Decompression procedures used to be much easier to discuss. Not that long ago divers around the world generally trusted a small number of dive tables to protect them. Conservatism was added by either staying away from the limits or computing limits using greater-than-actual depths and/or bottom times to create a cushion. Simple.
We now have dive computers running an array of base algorithms. More challenging, many designers and/or manufacturers have modified the base algorithms, frequently providing no details about the modifications. Still, we often choose to trust the box and its creators, sometimes with a near-religious fervor if the Internet hype is sufficiently compelling. Also simple.

The problem with simple solutions is that they often come with critical limitations. We must remember that decompression algorithms are mathematical models intended to predict the outcome of complex physiological processes. They almost certainly do not capture “truth,” but they do not actually need to. All they need to do is produce a satisfactory outcome frequently enough to be accepted. The problem comes when we believe these algorithms are smarter than they really are.
Decompression stress is determined by inert gas uptake and elimination. The dive profile is clearly the chief driver of this, but other factors, primarily thermal status and exercise, can play an important role in altering the rates. Dive computers are great at tracking dive profiles, but current devices do not integrate the impact of thermal or exercise factors in a meaningful way. And, yes, this is true even for the computers that measure water temperature and/or heart rate. It will also continue to be true for the forthcoming computers that measure heart rate, respiratory values and/or one- or two-site skin temperatures. The addition of these components is critical in learning how to build future-generation computers, but a tremendous amount of physiological data has to be collected and analyzed before we begin to understand how to meaningfully integrate such measures into decompression risk models.
What we do know now is that decompression algorithms this side of the Star Trek universe do not guarantee decompression safety. They can work well for some divers and some exposures, but the fact remains that decompression sickness (DCS) can develop in people who dive within the limits of decompression models. The actual risk results from a staggeringly complex interplay of the dive profile, the timing and intensity of thermal and exercise states and a host of individual factors. For some, the hopefully modest level of risk associated with current decompression algorithms is acceptable. Others may need additional buffers, either to address differences in susceptibility or simply for peace of mind. This brings us to conservative settings.
Many dive computers offer some degree of user-selectable conservatism, which is important since what appears on a computer screen is often accepted as an article of faith. It can be easier to follow the computer display showing a more conservative profile than to remember to stay away from the limits shown with more liberal settings. The biggest challenge in any case is remembering that just because the computer says a profile is safe does not necessarily mean it is.
Manufacturers have implemented a variety of conservatism protocols in dive computers. Some are less logical than others, but again “truth” is less important than a good outcome. The difficulty comes in assessing the impact of the array of settings, particularly if they are incompletely or poorly described by manufacturers or marketers. Fortunately, in our imperfect world there is one computational method of conservativism that I find intuitively easy to both quantify and understand: gradient factors.
Developed by Erik Baker, gradient factors allow divers to adjust exposure limits to become fractions of another limit. Gradient factors are commonly used with the Bühlmann algorithm, a well-researched set of decompression procedures for which the underlying source code was openly released to the community. The open release allowed a lot of bright and inquisitive eyes to fully evaluate the algorithm and contribute corrections that were incorporated into subsequently revised versions.
We need a little more background to proceed. Gas uptake and elimination can be predicted using exponential half-times. To illustrate: A diver descends to a fixed depth and stays there. One half-time in this situation is the time it takes for a tissue to take up inert gas equaling half the difference between the inert gas content found at equilibrium with the surface pressure and the gas content the tissue would have if saturated at the pressure of the current depth. The next half-time eliminates half of the remaining difference, and so on. Complete equilibration is achieved in about six half-times. The complication is that body tissues take up and eliminate inert gases at differing rates. The fastest tissues are the lungs, which achieve equilibrium almost instantly. Blood is another extremely fast tissue, followed by the brain. The slowest tissues are those that are relatively poorly perfused, such as ligaments and cartilage, or those that are relatively poorly perfused and have a high capacity for inert gas uptake, such as some fat tissues.
Each half-time used in an algorithm is referred to as a “compartment.” A given compartment does not have to equate to an actual tissue; rather, the intention is to use a collection of different half-time computations to estimate what happens throughout the body.
Robert Workman coined the term “maximum value,” shortened to “M-value,” in the mid-1960s when he was conducting decompression research with the U.S. Navy.1 Albert Bühlmann and other modelers also used the term. The M-value describes the magnitude of supersaturation (gas pressure greater than the ambient pressure) that a given tissue can theoretically tolerate during ascent before an orderly elimination of inert gas is replaced with a negative outcome. M-values can be predicted for any tissue compartment construct. Faster tissues have higher M-values based on the expectation that they can tolerate higher degrees of supersaturation than slower tissues, in part because their fast clearance rate means that high levels will not exist for long.
The computational power of dive computers is essential for estimating the status of multiple compartments in real time, adjusting the exposure limits based on whatever compartment is deemed most critical at any point in the process — the controlling compartment. This is important since modern divers rarely follow uncomplicated square profiles. Instead, they frequently follow complex descent-ascent profiles, relying on the dive computer to keep track of their decompression status.
While the M-value is a useful concept, we know that bubbles can form and DCS can develop even in exposures within the M-value limits. This is where conservatism factors become important. Knowing that the theoretical limit may not be safe and additional conservatism is desired, the allowable limits during decompression (ascent) can be adjusted, with the computer displaying the revised guidance. This adjustment can be made with strategies that “fool” the computer. For example, the amount of inert gas in the breathing supply could be set higher than it really is (if user-adjustable capabilities allow), or nitrox could be breathed while using a computer set to air. Alternatively, the surface pressure could be set lower than the actual pressure to prompt more conservative computations. The problem with the fooling approach is that undesirable side effects can result. For example, if a diver is breathing more oxygen than the computer expects, it will not provide the warnings about excessive oxygen exposure that it would if the correct oxygen levels were registered.
A better alternative to fooling the decompression algorithm is to limit the severity of the exposure while fully informing the model. This brings us back to gradient factors, which are defined by two values: The first number of the pair (“GF low”) represents the percentage of the M-value that establishes the first stop during ascent; the second number (“GF high”) is the percentage of the M-value that should not be exceeded at any point during surfacing. The dive computer effectively draws a straight line between the two, creating the ascent slope.
Dive computers that incorporate gradient factors typically provide either a limited number of choices or allow fully user-adjustable ranges. The figure below shows two example settings. The 0 percent line on the percent of M-value scale (Y-axis) is the point of no supersaturation; this can be thought of as the bottom depth from which a diver will depart to surface. The 100-percent line corresponds to the M-value limit, one that we know is not universally safe to approach. The 15/85 setting (dashed line) might be selected by someone who believes in deep stops and has substantial confidence in being bends-resistant. The first stop at only 15 percent of the M-value in a typical bounce dive (one in which most tissues do not reach saturation) pretty much ensures that inert gas uptake will continue during the stop in the intermediate and slow tissues since they are almost certainly below saturation at the stop depth. Allowing the supersaturation to reach 85 percent of the M-value during surfacing provides a modest buffer from a theoretical limit. It may be sufficient in some cases, but it might not be enough for susceptible individuals or if factors not measured by the dive computer act to increase the risk. Finally, the fairly steep nature of the curve means that there is a high rate of relative pressure change near the surface, where current knowledge indicates that a slow rate of ascent is safer.
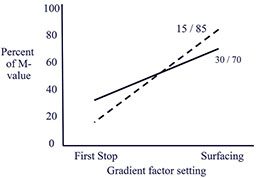
In comparison, the 30/70 setting (solid line) brings the diver farther off the bottom for the first stop, which reduces continued ongassing during the ascent. Reaching only 70 percent of the M-value during ascent provides a greater buffer for decompression safety, and the shallower slope indicates a reduced rate of pressure change in the critical near-surface zone.
Gradient factors were primarily developed for technical diving, but the concept translates directly to recreational diving, particularly use of the GF-high value. The typically slow ascent rates common in modern diving mean that GF low is often not reached unless a low value favoring deep stops (perhaps less than 20) is selected. GF high typically determines the greatest magnitude of decompression stress reached during the dive. Gradient factors are relevant to multilevel as well as square-profile diving.
Some divers will not appreciate the need to incorporate additional conservatism, particularly if they have not experienced decompression problems in the past. It is important to remember, though, that subclinical insults (undetected DCS) could pose some risk over time, that aging makes us all less bulletproof than we once were and that the real risk changes with the specifics of every individual and for every dive. Extra conservatism can be reassuring, and for many divers spending extra time in the water is a pleasure and not a penalty. Alternatively, most people will probably agree that DCS is a penalty.
Guaranteeing a safe outcome for all divers would almost certainly require an unacceptable degree of conservatism, but tools such as gradient factors can provide a middle ground. Divers who want to adjust their exposures for conservatism beyond base levels can do so easily. Computers that allow setting changes during a dive provide even more flexibility. Issues that may warrant adjustment include expending greater physical effort than expected at the bottom and a partial loss of gas supply. In the first example, the diver could reduce GF high to add more buffer or, in the second example, could increase it to prioritize surfacing speed over decompression conservatism. Those who rely on dive computers that lack the flexibility described here must remember to build in and follow their own buffers, regardless of what the box displays.
Learning about the available options is an important strategy in managing risk. The thoughtful and well-informed diver knows far more about conditions that may affect real-time risk during a dive than our current dive computers do — and probably far more than dive computers will for many years to come. It is important to use the available tools effectively for both planning and implementation on every dive. This will help ensure the good outcomes that every diver expects.
Choosing a Dive Computer
Mandatory features
- A thoughtfully selected decompression algorithm
- Sufficient computing power to run the complete algorithm
- Clearly explained and intuitively valid user-adjustable conservatism settings
- Ease of operation that does not require a user manual to implement even after a period of non-use
- A display that is easy to read and interpret
- Long battery life with clear power-level indicators and/or easily replaced batteries
Optional but helpful features
- Conservatism factors that can be adjusted during the dive to accommodate changing risks and priorities
- Downloading capability so dives and settings can be easily reviewed and compared
Reference
Baker EC. Understanding M-values. Available at: www.ddplan.com/reference/mvalues.pdf
© Alert Diver — Q4 Fall 2015